sudo reboot Display Manager installieren sudo apt install lightdm sudo apt install ubuntu-desktop Falls wir während der Installation gefragt werden, welchen Display Manager wir verwenden möchten, wählen wir hier lightdm aus. sudo reboot Partitions Manager GParted per Verwaltung installieren. Wir benötigt um Festplatten für Timeshift vorzubereiten. sudo apt-get install gparted sudo apt-get install timeshift
192.168.xx.xx:8000 ruft die install scripte auf Windows client installieren Power Shell starten als Administrator How to Enable windowsagentaioinstall.ps1 # Get-ExecutionPolicy-List Set-ExecutionPolicy -ExecutionPolicy Unrestricted -Scope Process ./WindowsAgentAIOInstall.ps1
sudo snap install curl Linux install via script Achtung bei MX-Linux bootoption auf systemctl umstellen. chmod +x linuxclientinstall.sh sudo ./linuxclientinstall.sh
Autostart Linux client sudo systemctl enable rustdesk
Ubuntu wayland ausschalten sudo nano /etc/gdm3/custom.conf Um den Fehler zu beseitigen die Datei /etc/gdm3/custom.conf editieren
[daemon]
# Enabling automatic login
AutomaticLoginEnable=true
AutomaticLogin=$USERNAME (mit dem Anmeldenamen ersetzen)
# Uncomment the line below to force the login screen to use Xorg
WaylandEnable=false
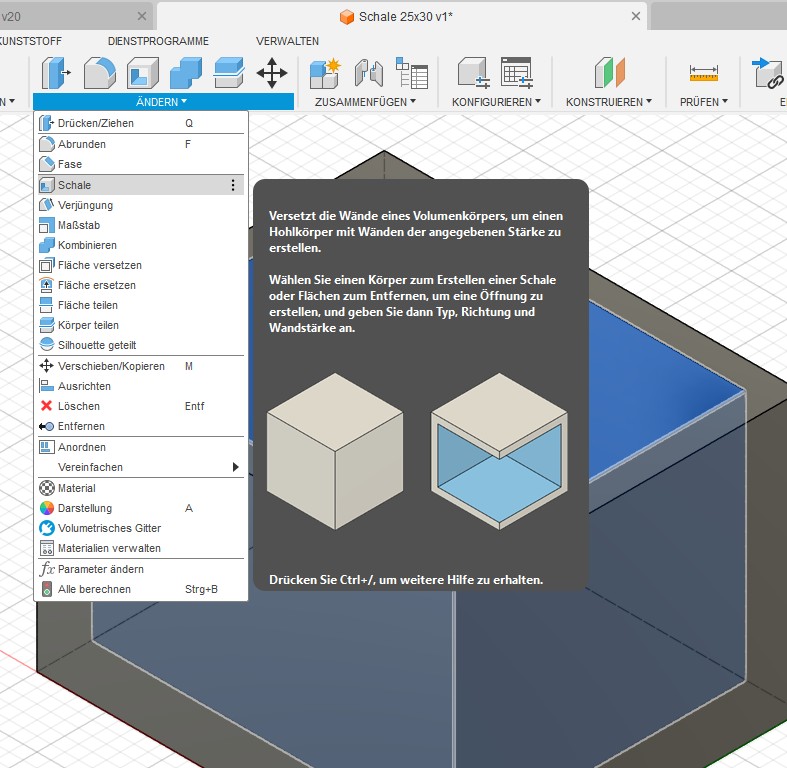
Start -> Helles Thema wählen Datei neu wählen Werkzeuge -> Add-on Manager OpenThemes installieren Bearbeiten Einstellungen-> Applikation einstellen OpenLight Beim Apfel auf FreeCad -> Einstellungen FreeCad neu Starten dann nochmal Einstellungen OpenPreferences anwenden Anzeige FreeCad neu starten Anzeige BIM ignorieren und Start nochmal weg x en. Einstellungen -> Arbeitsbereiche abwählen
BIM FEM CAM MESH Surface Anwenden und OK Einstellungen Sketcher Raster EIN Neu Starten Neue Datei und einen Grundkörper Einfügen Fenster Links und Rechts Überlagerung Modus umschalten Ausgabefenster unter Ansicht Fenster -> Ausgabefenster nach rechts ziehen.
Symbolleisten entsperren Rechtsklick in die Symbolleiste und hacken sperren entfernen
MySql Server installieren sudo apt install mysql-server Status überprüfen -> sudo service mysql status QUIT mit der Eingabe q Netzwerkstatus -> sudo ss -tap | grep mysql Die Datei /etc/mysql/ /etc/mysql/mysql.conf.d/mysqld.cnf den Bind Eintrag anpassen auf die Server IP bind-address = 192.168.0.5
$ sudo mysql -u root
Welcome to the MySQL monitor. Commands end with ; or \g.
Your MySQL connection id is 7
Server version: 5.7.20-0ubuntu0.16.04.1 (Ubuntu)
Copyright (c) 2000, 2017, Oracle and/or its affiliates. All rights reserved.
Oracle is a registered trademark of Oracle Corporation and/or its
affiliates. Other names may be trademarks of their respective
owners.
Type 'help;' or '\h' for help. Type '\c' to clear the current input statement.
mysql> CREATE DATABASE wordpress;
Query OK, 1 row affected (0,00 sec)
mysql> CREATE USER wordpress@localhost IDENTIFIED BY '<your-password>';
Query OK, 1 row affected (0,00 sec)
mysql> GRANT SELECT,INSERT,UPDATE,DELETE,CREATE,DROP,ALTER
-> ON wordpress.*
-> TO wordpress@localhost;
Query OK, 1 row affected (0,00 sec)
mysql> FLUSH PRIVILEGES;
Query OK, 1 row affected (0,00 sec)
mysql> quit
Bye
Next, set the database credentials in the configuration file (do not replace database_name_here or username_here in the commands below. Do replace <your-password> with your database password.):
sudo -u www-data sed -i ’s/database_name_here/wordpress/‘ /srv/www/wordpress/wp-config.php
sudo -u www-data sed -i ’s/username_here/wordpress/‘ /srv/www/wordpress/wp-config.php
sudo -u www-data sed -i ’s/password_here//‘ /srv/www/wordpress/wp-config.php
sudo -u www-data nano /srv/www/wordpress/wp-config.php Find the following: define( ‚AUTH_KEY‘, ‚put your unique phrase here‘ ); define( ‚SECURE_AUTH_KEY‘, ‚put your unique phrase here‘ ); define( ‚LOGGED_IN_KEY‘, ‚put your unique phrase here‘ ); define( ‚NONCE_KEY‘, ‚put your unique phrase here‘ ); define( ‚AUTH_SALT‘, ‚put your unique phrase here‘ ); define( ‚SECURE_AUTH_SALT‘, ‚put your unique phrase here‘ ); define( ‚LOGGED_IN_SALT‘, ‚put your unique phrase here‘ ); define( ‚NONCE_SALT‘, ‚put your unique phrase here‘ );
Delete those lines (ctrl+k will delete a line each time you press the sequence). Then replace with the content of https://api.wordpress.org/secret-key/1.1/salt/. (This address is a randomiser that returns completely random keys each time it is opened.) This step is important to ensure that your site is not vulnerable to “known secrets” attacks.
Save and close the configuration file by typing ctrl+x followed by y then enter
Anleitung zum Austausch der CMOS Batterie im Terra PC Model 1008073
Leider ist die CMOS Batterie unter der Laufwerks Abdeckung angebracht. Der Stecker ist ohne gesamt Öffnung der Gehäuses nicht erreichbar. Die Batterie ist echt stark mit Kleber befestigt.
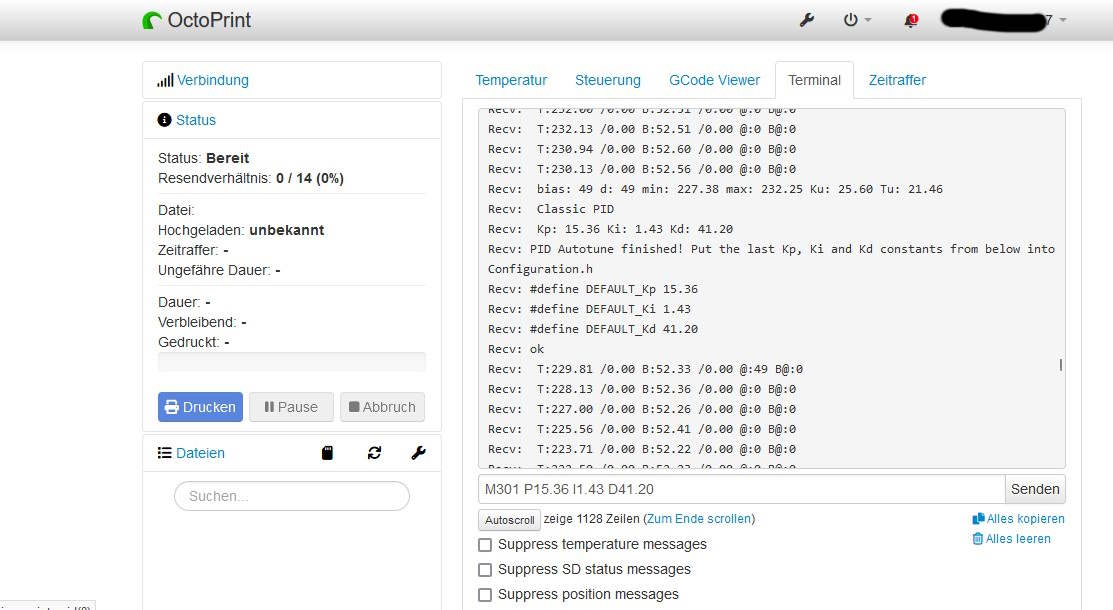
Kopieren Sie folgenden GCode „M303 E0 S230 C8“ in das Eingabefeld. E steht in diesem Fall für ihren Extruder, S für die zu erreichende Temperatur und C für die Anzahl der Zyklen die durchlaufen werden sollen.
Sollte es zu einer Fehlermeldung kommen Bad heater id in PiD tuning bed erst mal eine andere Extrudernummer Versuche -> E1. Sollte es immer noch zu einer Fehlermeldung kommen, dann bitte die Configuration.h kontrollieren. Sollte MPC aktiviert sein, kommt es ach zu Fehlermeldung.
Nun durchläuft ihr 3D-Drucker 8 Zyklen Aufheizphase, um die optimalen Werte zu ermitteln.
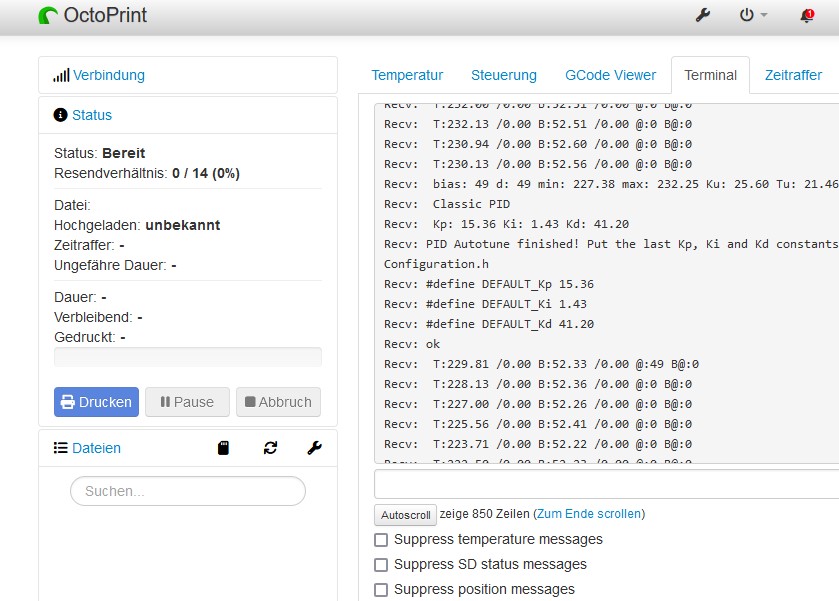
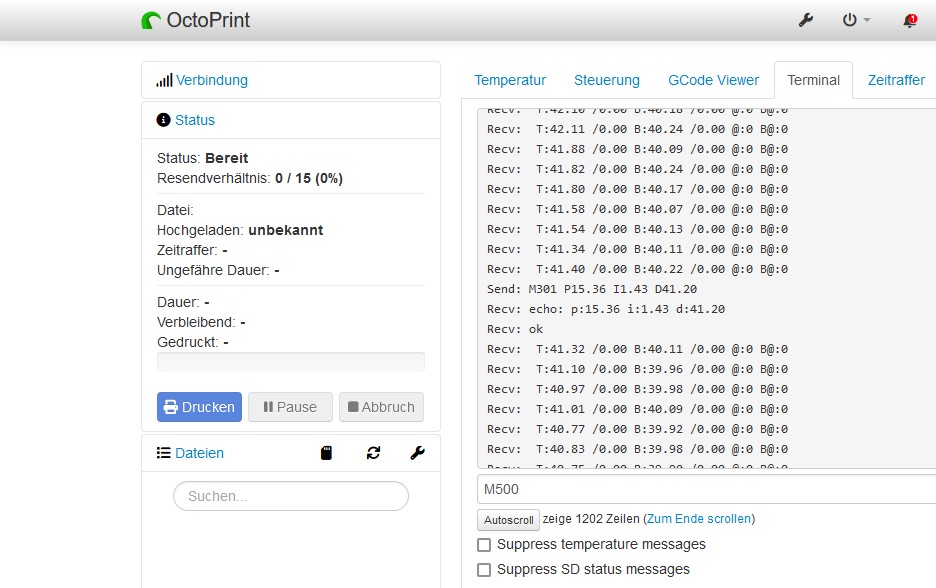
Nach dem achten Durchlauf wird ihnen folgendes in Octoprint ausgegeben: Recv: PID Autotune finished! Put the last Kp, Ki and Kd constants from below into Configuration.h. Diese 3 Werte bauen sie sich wie folgt als Befehlscode um: „M301 P15.36 I1.43 D41.20“ und kopieren diese Zeile in das Eingabefeld von Octoprint und bestätigen es. Mit „M500“ werden die neuen Werte im Eeprom abgespeichert. Das war es auch schon mit dem PID-Tuning für ihr Hotend.
Nicht vergessen mit M500 abspeichern.
Wer gerne möchte, kann es auch mit Pronterface erledigen.
PID-Tuning Heizbett mit Octoprint
Wer es gerne möchte kann es auch mit Pronterface erledigen
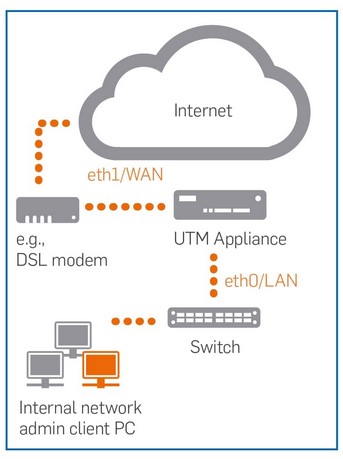
Da ich immer wieder sehr massiv aus dem Internet angegriffen werde habe ich mich dazu entschieden eine HW Firewall zu installieren.
Als erstes muss man sich Gedanken machen wie die IPs konfiguriert werden sollen. Es sind natürlich zwei getrennte Bereiche und die WAN Seite kann auch nicht als Privates Netz konfiguriert werden. Ich möchte natürlich nicht mein jetzt bestehendes Netzwerk (IPs) umkonfigurieren das wäre ein riesiger Aufwand. Ich denke, ich werde der FritzBox eine neue IP vergeben.
IP FritzBox 192.168.xx.1 Internes Netzwerk 192.168.xxx.1 DHCP bleibt erstmal auf der QNAP Als DNS nehmen wir estmal die von der Telekom 217.237.150.205 217.237.149.142
sudo apt-get install cifs-utils sudo mkdir /mnt/qnap sudo mkdir /mnt/backup #Mount Point für rsync backup
sudo mkdir /mnt/syno
sudo chown -R <user>:<user> /mnt/qnap sudo chown -R <user>:<user> /mnt/backup #wird nicht in die fstap eingetragen sudo chown -R <user>:<user> /mnt/syno
sudo nano /etc/fstab Am ende der Datei das folgende eintragen://192.168.xxx.xx/Data /mnt/qnap/ cifs username=deinname,password=deinpasswort,iocharset=utf8,file_mode=0777, dir_mode=0777
Check falls es nicht klappt:
Bei Q4OS habe ich festgestellt das der mount unter /mnt/qnap leer war.
Abhilfe sacht hier anstatt der IP Adresse den DNS namen einzugeben also in der fstab:
//2qnap.local/Data /mnt/qnap …..
Zorin OS
muss samba nach installiert werden
sudo ufw allow samba
sudo service smbd restart
smb://<Server/IP-Adresse>/<Freigabe>
//Server/Freigabe /mnt/lokaler_ordner cifs username=IhrBenutzername,password=IhrPasswort,uid=1000,gid=1000 0 0
Ersetzen Sie Server/Freigabe durch die tatsächliche Netzwerkfreigabe.
Ersetzen Sie /mnt/lokaler_ordner durch den Pfad zu einem Ordner, der als Einhängepunkt dient.
Ersetzen Sie IhrBenutzername und IhrPasswort durch Ihre Anmeldedaten.
uid=1000 und gid=1000 können je nach Ihrem Benutzerkonto angepasst werden.
Falls gewollt ist jetzt der richtige Zeitpunkt für die Win 11 Integration
Vorher mit timeshift ein aktuelles Backup erstellen.
flameshot -> Screen shot tool KRename sudo apt-get install shutter -> Sceen shot tool sudo apt-get install krita -> Grafik tool erst deinstallieren dann über die Packetverwaltung neu installieren sudo apt install net-tools Deja Dup -> Backup Software
duplicati -> von Dateisystem installieren NFS instalieren -> sudo apt install nfs-common sudo apt-get install iperf digiKam – sudo apt-get install digikam Visual Studio Code Picasa Shotwell darktable Pinta Drawing oder Zeichnung Simplescreenrecorder Ristretto Shotcut Fritzing Audacity Ocenaudio from Website Filezilla über Anwendungsverwaltung Gimp Freecad Blender Inkscape kdiff3
Davor muss unter Mint Snap installiert werden sudo mv /etc/apt/preferences.d/nosnap.pref /etc/apt/preferences.d/nosnap.backup sudo apt update sudo apt install snapd
Smart File renamer https://qiplex.com/software/large-files-finder/ PeaZip ffmpeg VLC Plex MediathekView Arduino IDE Draw.io von Netzwerk Impression -> Image erstellen Ocular -> PDF reader Errands Planify Catfish Kdenlive Back in time-qt Backup software
Anmekungen zu GCstar
Standardmäßig wird in GCstar das Tvdb-Plugin für die Internetsuche von Metadaten installiert. Leider werden standardmäßig keine Daten aus der deutschen Tvdb importiert. Dies lässt sich einfach ändern, indem man das Tvdb-Plugin erweitert. Die Dateien (Perl-Scripte) des Tvdb-Plugins liegen unter /usr/share/gcstar/lib/GCPlugins/GCTVepisodes/. Dort kopiert man eine der bestehenden Dateien wie z.B. GCTvdbFR.pm in eine neue Datei mit dem Namen GCTvdbDE.pm und ändert die Länderkennungen.
Sollte es Probleme mit der Internetsuche geben, so kann es helfen, das Plugin mit folgendem Befehl manuell zu aktualisieren
sudo gcstar -u -w
cd /usr/share/gcstar/lib/GCPlugins/GCTVepisodes/
sudo cp GCTvdbFR.pm GCTvdbDE.pm
use strict;
use GCPlugins::GCTVepisodes::GCTvdb;
{
package GCPlugins::GCTVepisodes::GCPluginTvdbDE;
use base qw(GCPlugins::GCTVepisodes::GCPluginTvdb);
sub getLang
{
return 'DE';
}
sub getName
{
return "Tvdb DE";
}
sub siteLanguage
{
my $self = shift;
return 'de';
}
sub siteLanguageCode
{
my $self = shift;
return 14;
}
}
1;
Partitions Manager GParted per Verwaltung installieren. Wir benötigt um Festplatten für Timeshift vorzubereiten. Timeshift per App Verwaltung installieren. Bei der Angabe Ort ist das Externe Speichermedium gemeint. Alle Dateien einschließen wählen.
————————————————————————————————————– AppImage herunterladen (z. B. nvim.appimage)
Terminal öffnen
cd ~/Downloads
Ausführbar machen
chmod +x nvim.appimage
App an einen Ort verschieben, der sich im PATH befindet.
sudo mv nvim.appimage /usr/local/bin/nvim
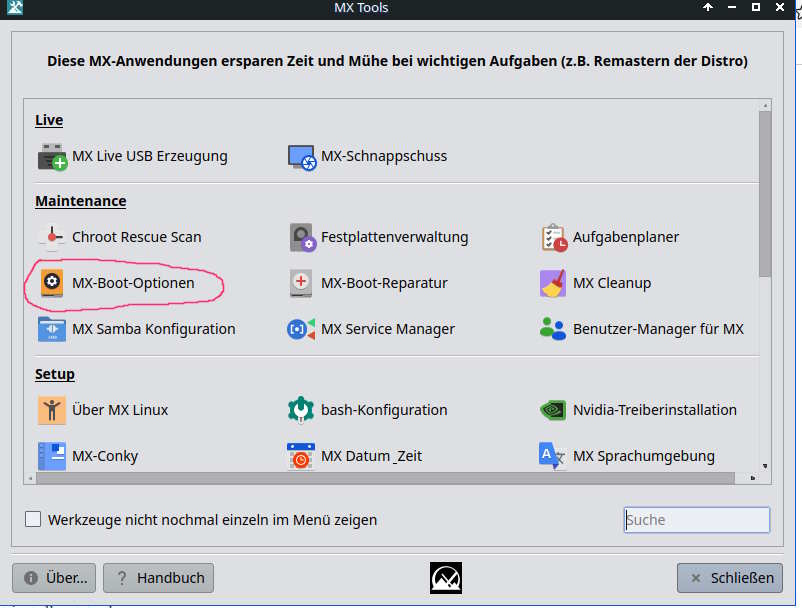
Aus dem linken Bereich das gewünschte Menü auswählen. Auf „Neues Element“ klicken. Der Anwendung einen Namen geben. Im Abschnitt „Befehl“ den Namen der ausführbaren Datei eingeben, die gerade in /usr/local/bin verschoben wurde, in diesem Beispiel „nvim“.
Mit der rechten Maustaste auf das Startmenü klicken und auf „Konfigurieren“ klicken. In diesem Bildschirm auf die Registerkarte „Menü“ klicken. Und auf „Menü-Editor öffnen“ klicken.
Tips & Tricks
Symbol link erstellen
ln -s /pfad/zum/netzwerk/ordner/meine_datei.txt ~/Desktop/verknuepfung_meine_datei
ln -s /mnt/qnap/Datenbanken/Filmliste/Inhalte_TXT_neu/filme.ods ~/Schreibtisch/filme
Softlinks für Ordner
ln -s /home/peter/videos/ /home/peter/Desktop/softlink_für_video-ordner
ln -s /mnt/qnap/Datenbanken/ ~/Schreibtisch/Datenbanken
ln -s /mnt/qnap/Documente/ ~/Schreibtisch/Documente
ln -s /mnt/qnap/Filme/ ~/Schreibtisch/Filme
=============================================================================================
Robocopy Ersatz
robocopy Quellverzeichnis Zielverzeichnis /MIR /R:1 entspricht,
wäre unter Linux:
rsync -avx --delete --progress Quellverzeichnis/ Zielverzeichnis.
rsync [optionen] quelle ziel
-a Steht für „archive“ und ist einer der am häufigsten verwendeten Optionen.
Die Option -a beinhaltet folgende Optionen -rlptgoD und kopiert somit
Unterverzeichnisse, Symbolische Links und Rechte von Usern, Gruppen und Andere sowie
die Zeitstempel der Dateien und Ordner von der Quelle.
Kurz gesagt „-a“ macht eine 1zu1 Kopie von Quelle zum Ziel und ist grade für backups
ideal geeignet.
---------------------------------------------------------------------------------------------
-v Steht für “verbose” und Zeigt während der Synchronisation alles was rsync macht
grade an.
---------------------------------------------------------------------------------------------
--delete Löscht Daten die sich nicht (mehr) in der Quelle befinden. wird oft bei
Backupscripten verwendet oder wenn Ordner 1zu1 immer auf den gleichen
Stand sein sollen.
---------------------------------------------------------------------------------------------
-u Steht für “update” und überspringt Daten die im Ziel neuer als in der Quelle sind
---------------------------------------------------------------------------------------------
-n (–dry-run) Simuliert also nur was rsync machen würde, ohne echte Daten zu
Kopieren oder zu überschreiben.
---------------------------------------------------------------------------------------------
--exclude=PATTERN Exkludiert bestimmte Daten die mit „PATTERN“ definiert werden beim
übertragen.
---------------------------------------------------------------------------------------------
--iconv Konvertiert Daten zwischen Systemen mit verschiedenen Codepages
---------------------------------------------------------------------------------------------
--progress Zeigt die Zeit in Prozent und Geschwindigkeit beim übertragen von Daten an.
---------------------------------------------------------------------------------------------
--ignore-existing Diese Option weist rsync an, jede Datei zu überspringen, die im
Zielverzeichnis bereits existiert. Das ist die direkteste Methode,
um das Überschreiben bereits vorhandener Dateien zu verhindern.
rsync -av --delete /opt/tools/ root@meinserver.de:/opt/tools
Kopiert alle Daten inkl. Unterordner von /opt/tools auf den entfernten Server root@meinserver.de (via SSH) in den Ordner /opt/tools. Dabei werden alle Daten die sich schon in /opt/tools auf root@meinserver.de gelöscht, sofern diese nicht in der Quelle vorhanden sind.
Also eine 1zu1 Kopie.
Bash scripte
sudo touch script.sh -> leeres script
sudo nano script.sh edit das script
#!/bin/bash
# Update the repo
sudo apt update
# Install available updates
sudo apt upgrade
Ausführbar machen
sudo chmod +x script.sh
Ausführen des Scriptes
./script.sh
./path/to/folder/script.sh
If you wish to keep the script running in the background after closing terminal, you can use the nohup command:
nohup ./script.sh &
Script Backup Achtung auf korrekte Schreibweise achten:
#!/bin/bash
# Backup Script
cd /
sudo rsync -avx --delete ..... komplette script weiter unten
Wichtig rechte setzen -> sudo chmod -R 777 /media/slubahn/Backup_Z/qnap
Ordner von Quelle und Ziel müssen Vorhanden sein!!!
Im terminal Prüfen mit ls ob alles ok ist -> Backup_Z/qnap
Tipp -> Solange noch Windows/Samba subsysteme gibt ist es besser mit gparted als NTFS zu erstellen. Darauf achten das Parition Name Backup_Z
Festplatten anzeigen
sudo fdisk -l
sudo chmod +x xxxx.sh ausführbar machen
Hier jetzt das absolut funktionierende script:
Backup auf NAS system mount muss vorhanden sein
#!/bin/bash
# Backup Script
sudo mount -t cifs //192.168.178.88/Data /mnt/backup/ -o uid=1000,gid=1000,rw,user,username=dein username,password=dein passwort
cd /
sudo rsync -avx --delete --progress /mnt/qnap/Datenbanken/ mnt/backup/qnap/Datenbanken/
sudo rsync -avx --delete --progress /mnt/qnap/Musik/ mnt/backup/qnap/Musik/
sudo rsync -avx --delete --progress /mnt/qnap/comdata/ mnt/backup/qnap/comdata/
sudo rsync -avx --delete --progress /mnt/qnap/Bilder/ mnt/backup/qnap/Bilder/
Backup auf local angeschlossene HD
#!/bin/bash
# Backup Script
cd /
sudo rsync -avx --delete --progress /mnt/qnap/Datenbanken/ media/slubahn/Backup_Z/qnap/Datenbanken/
sudo rsync -avx --delete --progress /mnt/qnap/Musik/ media/slubahn/Backup_Z/qnap/Musik/
sudo rsync -avx --delete --progress /mnt/qnap/comdata/ media/slubahn/Backup_Z/qnap/comdata/
sudo rsync -avx --delete --progress /mnt/qnap/Bilder/ media/slubahn/Backup_Z/qnap/Bilder/
Aufruf im Terminal sudo ./bachup.sh
Netzwerkleistung messen
Auf einem Server und client installieren
sudo apt-get install iperf
Auf dem Server iperf -s starten
Auf dem Client iperf -c [Server-IP] -d starten
Mint installieren wenn RST nicht deaktiviert werden kann
Ausführen
sudo nano /usr/lib/ubiquity/plugins/ubi-prepare.py
Nach unten scrollen bis die Zeile:
def show_rst_page
erscheint
Dort muss auch
return True stehen
Alles Löschen zwischen diesen beiden Einträgen. Es sollte so aussehen
def show_rst_page
return True
True duch False ersetzen.
Speichern und jetzt instalieren auswählen
Überlange Festplatten Bezeichnungen umbenennen
1. Label für FAT32 / VFAT / exFAT ändern Hierfür wird das Tool mlabel (aus dem Paket mtools) verwendet.
Label ändern:bashsudo mlabel -i /dev/sdb1 ::neuer_name(Ersetzen Sie /dev/sdb1 durch Ihr tatsächliches Gerät).
Test der installation Ihr WebDAV-Server ist unter http://<hostname>/webdav erreichbar.
Ubuntu Verbindung 1. Klicken Sie im Fenster Files (Dateien) auf die Option Connect to Server (Verbinden zum Server). 2. Geben Sie in dem geöffneten Fenster den Wert dav://<hostname>/webdav ein und klicken Sie auf die Schaltfläche Connect (Verbinden). 3. Sie werden nach Ihren Zugangsdaten gefragt. Geben Sie Ihren WebDAV-Benutzernamen und Ihr Kennwort ein, die in der Kennwortdatei angegeben sind, und klicken Sie auf Connect
Sollte unter MacOS zu einer Fehlermeldung kommen das kein zugriff besteht muss der App erlaubt werden im lokalen Netzwerk zu griff zu erhalten: Du kannst den Zugriff einer App auf das lokale Netzwerk jederzeit erlauben oder entziehen: Gehe unter „Einstellungen“ zu „Datenschutz & Sicherheit“* > „Lokales Netzwerk“, um eine Liste aller Apps anzuzeigen, die Zugriff angefordert haben.
Bei zum Bespiel sudo systemctl start ssh Fehlermeldung sudo systemctl start ssh System has not been booted with systemd as init system (PID 1). Can’t operate. Failed to connect to bus: Host is down
Systemd command Sysvinit command
sudo systemctl start service_name sudo service service_name start sudo systemctl stop service_name sudo service service_name stop sudo systemctl restart service_name sudo service service_name restart sudo systemctl status service_name sudo service service_name status sudo systemctl enable service_name sudo chkconfig service_name on sudo systemctl disable service_name sudo chkconfig service_name off
Snap Store lässt sich nicht aktualisieren killall snap-store sudo snap refresh
Pronterface Meldung SD not Printing Stoppen: Eingeben M27 S0
Aktualisierungsverwaltung schlägt fehl
Meldung: E: Repository ‚http://ppa.launchpad.net/ondrej/php/ubuntu artful InRelease‘ changed its ‚Label‘ value from ‚***** The main PPA for PHP (5.6, 7.0, 7.1) with many PECL extensions *****‘ to ‚***** The main PPA for supported PHP versions with many PECL extensions *****‘ N: This must be accepted explicitly before updates for this repository can be applied. See apt-secure(8) manpage for details.“ oder so ähnlich.
Backup mit Timeshift durchführen Aktualisierungsverwaltung starten, alle updates installieren Bearbeiten dann auswählen Linux Mint 22.3 Zena es müssen 4 GB freier Festplatten platz vorhanden sein. Nach der installation system neu starten. Nach dem neustart info eingeben. Es sollte jetzt 22.3 angezeigt werden.